

東芝が提案する、令和時代のロボットソリューション 【前編】技術編
2019/12/18 Toshiba Clip編集部
この記事の要点は...
- 社会のニーズに応え続ける、東芝のロボット開発
- ロボットは賢くて器用になる? 高知能化で広がるロボットの活躍範囲
- 人間とロボットが協業するための安全対策
東芝創業者の一人でもある「からくり儀右衛門」こと田中久重は、江戸時代に弓曳童子(ゆみひきどうじ)などの高度な動作を行うロボットを作り出したことで知られている。こうした創業者のDNAが現在も受け継がれ、東芝は長年にわたり新しいロボットを生み出してきた。
からくり儀右衛門の時代には、技術そのものが存在意義であったロボットも、現在では社会のニーズに応えることが求められている。
21世紀も20年が経とうとする今、東芝は社会のどんなニーズに応えるために、どんな「からくり」を用意しているのだろうか。
高知能化によって広がる、ロボットの可能性
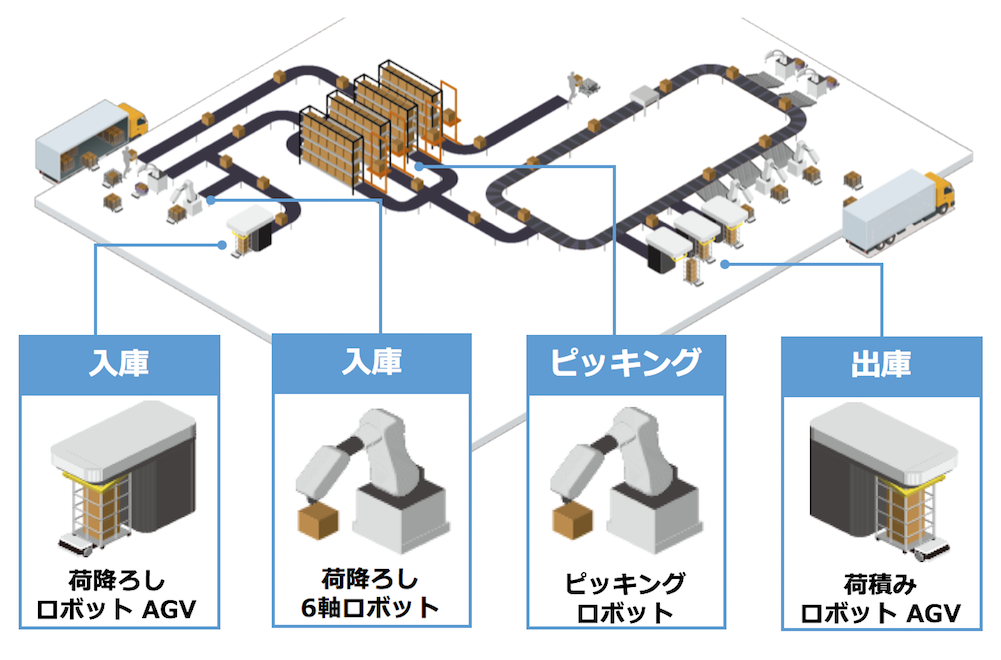
労働人口の減少による人手不足の深刻化が、社会の大きな課題となって久しい。人手不足は、あらゆる業種を襲っているが、特に物流業界では「物流崩壊」という衝撃的なワードとともに、一刻を争う問題として認識されている。
東芝はこれまでも、製造・流通・物流のニーズに合わせて、様々なロボットを提供してきた。古いところでは、1967年に手書き文字を認識する世界初の郵便番号自動読取区分機の開発がある。これは、翌年から始まった郵便番号制度と合わせ、長きにわたり人の手で行われていた郵便物の行き先仕分け作業を機械化し、高度成長期の日本の発展を支えた。東芝は、現在でもこの分野で高いシェアを維持している。

1967年に発表された、世界初の実用手書き郵便番号自動読取区分機
この郵便番号自動読取区分機は、人間が「宛先を見て、分類する」という作業を機械化することで、効率を向上させた。その作業だけを見れば、人間が行うよりも圧倒的に早く、24時間休み無く続けることができる。だが、ポストに投函した郵便物を、正しく宛先に届けるという郵便業務全体を見渡すと、まだ人間が作業を行わなければならないパートは多い。
郵便同様に製造・流通・物流分野でも、ロボットによる様々な自動化が導入されてきた。それでも、物流崩壊は社会問題となってしまった。これは、物流崩壊が人手不足に端を発する問題であるためであり、この問題の解決には、これまで自動化できなかった作業の大幅な自動化、すなわち「人間でなければ」と思われていた作業領域の自動化が必要なのだ。
人間に代わり作業するロボットに、必要なことは?
これまでの産業用ロボットは、同じような作業を繰り返すことを得意としていた。逆に言えば、周囲の環境や状況に応じて作業内容を変化させることを苦手としていた。
これは、ロボットには、人間のような能力が無かったためである。あらかじめ想定された範囲内で判断をすることはできるが、無限に増える新しい状況に対応し、効率のいい方法を選んで作業を行うような非定型の作業はできなかったのだ。
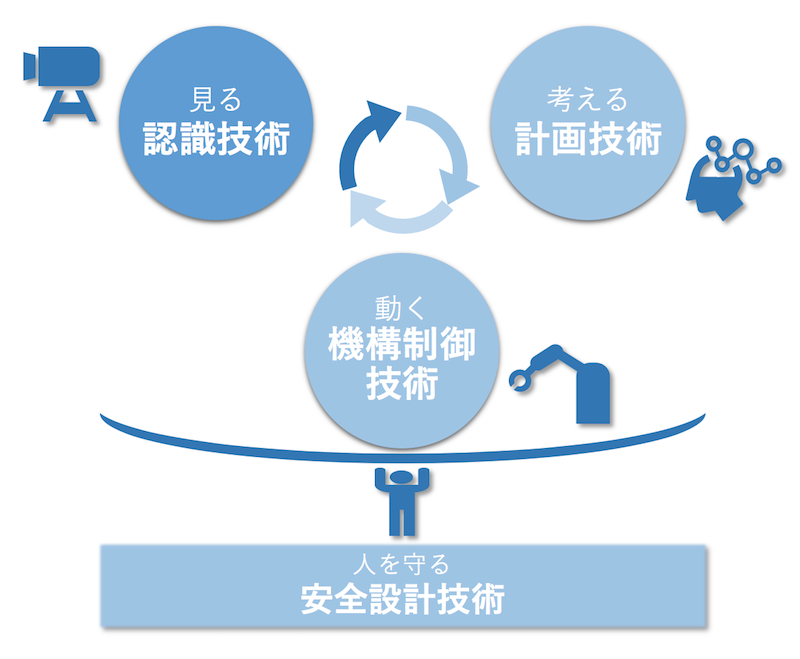
こうした非定型の作業をロボットにさせるためには、「見て」「考えて」「動く」ためのロボットの知能化が必要となる。
具体的には、「見る」能力は「認識技術」、「考える」能力は「計画技術」、「動く」能力は「機構制御技術」となる。
さらに、こうしたロボットは、今以上に人間の近くで作業を行うことが想定されるため、ロボットを構成するすべての技術が、人を守るための「安全設計技術」の上に成り立っていなければならないのである。
人間は、周囲の状況を視覚や触覚などで感じ取っている。ロボットに人間と同じような状況把握をさせるためには、高度な「認識技術」が必要となる。
たとえば、様々な形のモノが雑然と積み上げられたような中から、正確にモノをつかみ上げるためには、どんなモノがそこにあるのか、それぞれのモノがどのように配置されているのかなどを正確に捕らえるための「物体領域抽出技術」が必要だ。東芝は、この物体領域抽出技術の推定精度で世界一を達成(※1)している。
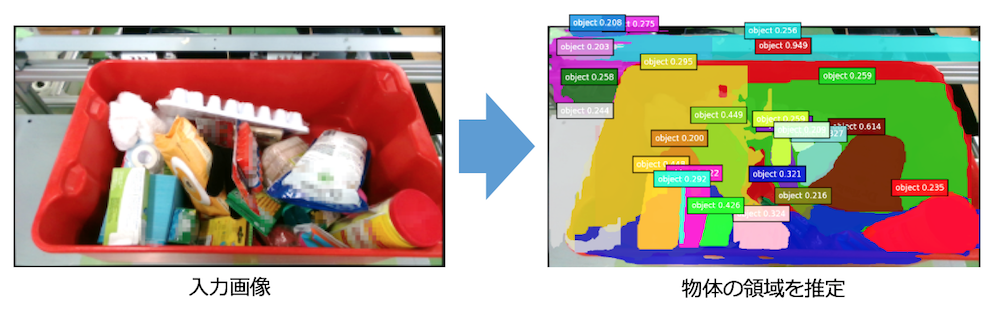
物体の領域を推定する技術で、東芝は世界最高の推定精度を達成※1
*1: V. Pham et al. “BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks”. The Proceedings of the British Machine Vision Conference 2017
この認識技術は、「動く」ための「機構制御技術」に欠かせない情報を取得する手段ともなる。
これまでのロボットは、レールや床に描かれたマーカーなどをトレース(認識)することで正確に移動してきた。だが、この認識技術を利用して基準となる位置とロボットの現在地のずれを比較することで自己位置を推定し、レールやマーカーの無い場所でも自在に正確な移動を行うことができる。これは、ロボットが自分で判断して最適な導線を描くために必要な機能だ。
このように、認識技術は人間の目に相当する能力をロボットに与えることを目指した技術と言える。
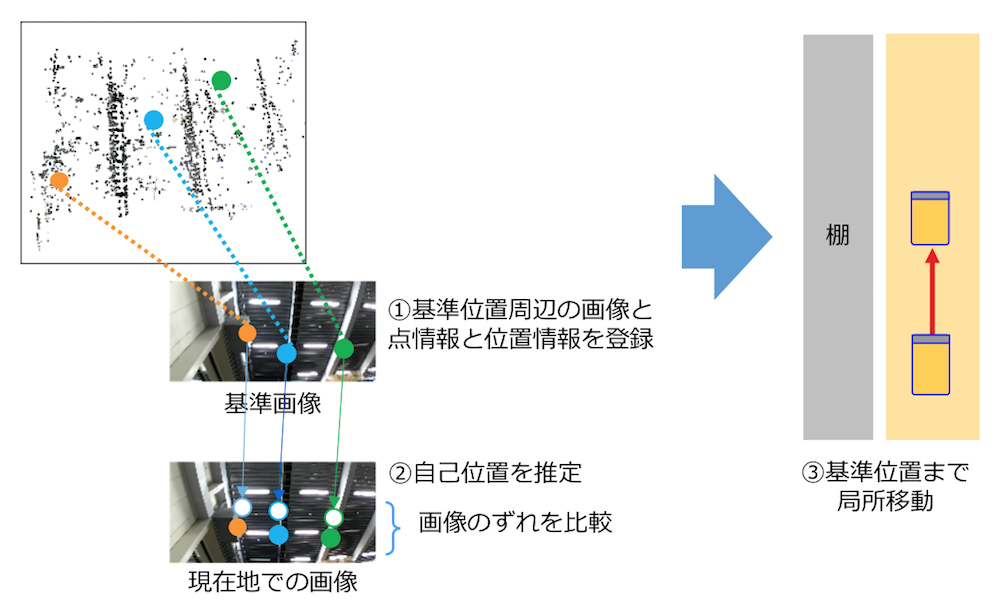
認識技術による、自己位置推定。画像を利用して自己の位置を推定することで、床上のレールやマーカーは不要
「考える」ための「計画技術」は、認識技術によって得られた情報を基に、ロボットが自ら考えて動作することを目指す能力だ。
箱の中にあるモノをつかみ上げるとき、人間はつかもうとするモノがどこにあって、どんな大きさで、どれくらいの重さかを考えながら、自分の手をどうやって差し出すことで、箱の内側や、他のモノにぶつからないようにつかむことができるかを考える。
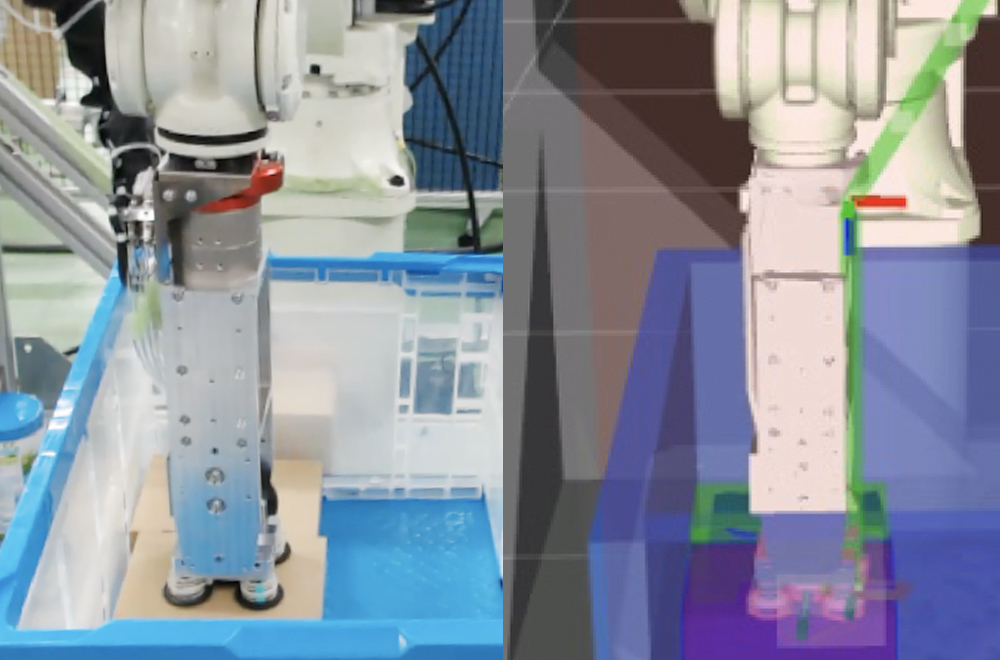
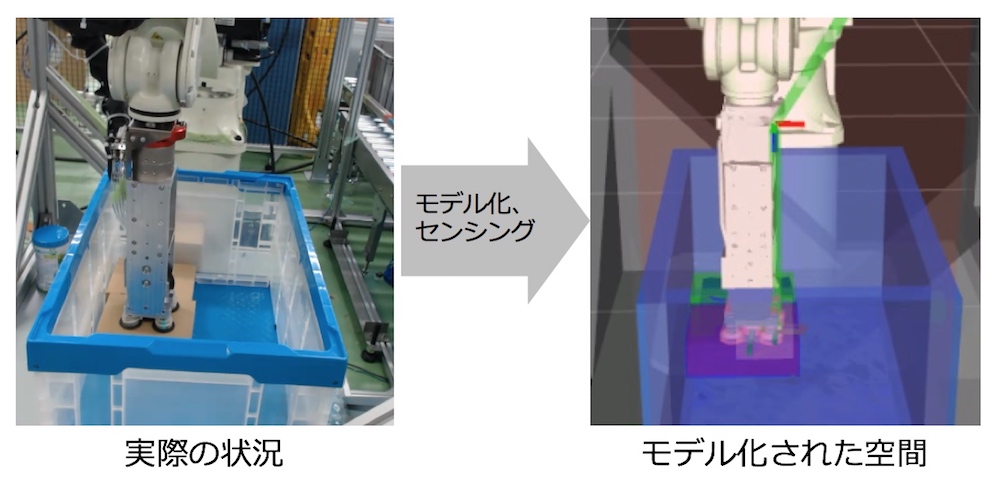
ロボットで言うなら、ロボットアームをどのように動かせば、周りにぶつからずに対象物をつかみ上げられるか、動作の計画をする必要がある。今までこの動作計画は、人間が指示していた。だが、ロボットが自分で収集した情報から考えて動作を計画する。これが計画技術だ。ロボットが動作計画を作成することは、認識技術によって得られた情報から、コンピュータの中に作られたモデル空間でシミュレーションを繰り返して最適な動作計画を行うことで実現する。
動作計画が生成されたら、次は実際に「動く」ことになる。この「動く」ために必要な技術が「機構制御技術」だ。これは、人間で言うならば「器用に動くための技術」と言える。
「器用」と言えるためには、シミュレーションによって作成されたロボットアームの動作計画通りに、正確にロボットアームを動かす以上の性能が必要だと東芝では考えている。
たとえば、箱の中に荷物を入れる場合、人間なら箱の端に荷物を寄せて配置していく。端に荷物を寄せるためには、目で見て箱の端を確認し、おおよそその付近に荷物を下ろす。その後壁に向かってゆっくり荷物を動かして、壁と荷物の接触による反力を手の感覚で検出して、端に寄せられたことを確認してから手の力を抜く。
こうした人間が無意識に行っている作業を、ロボットアームで実現することが、器用に動くための技術なのだ。
具体的には、アームに取り付けられた「力覚センサ」によって、荷物と壁との接触を検出することで、器用さを実現する。
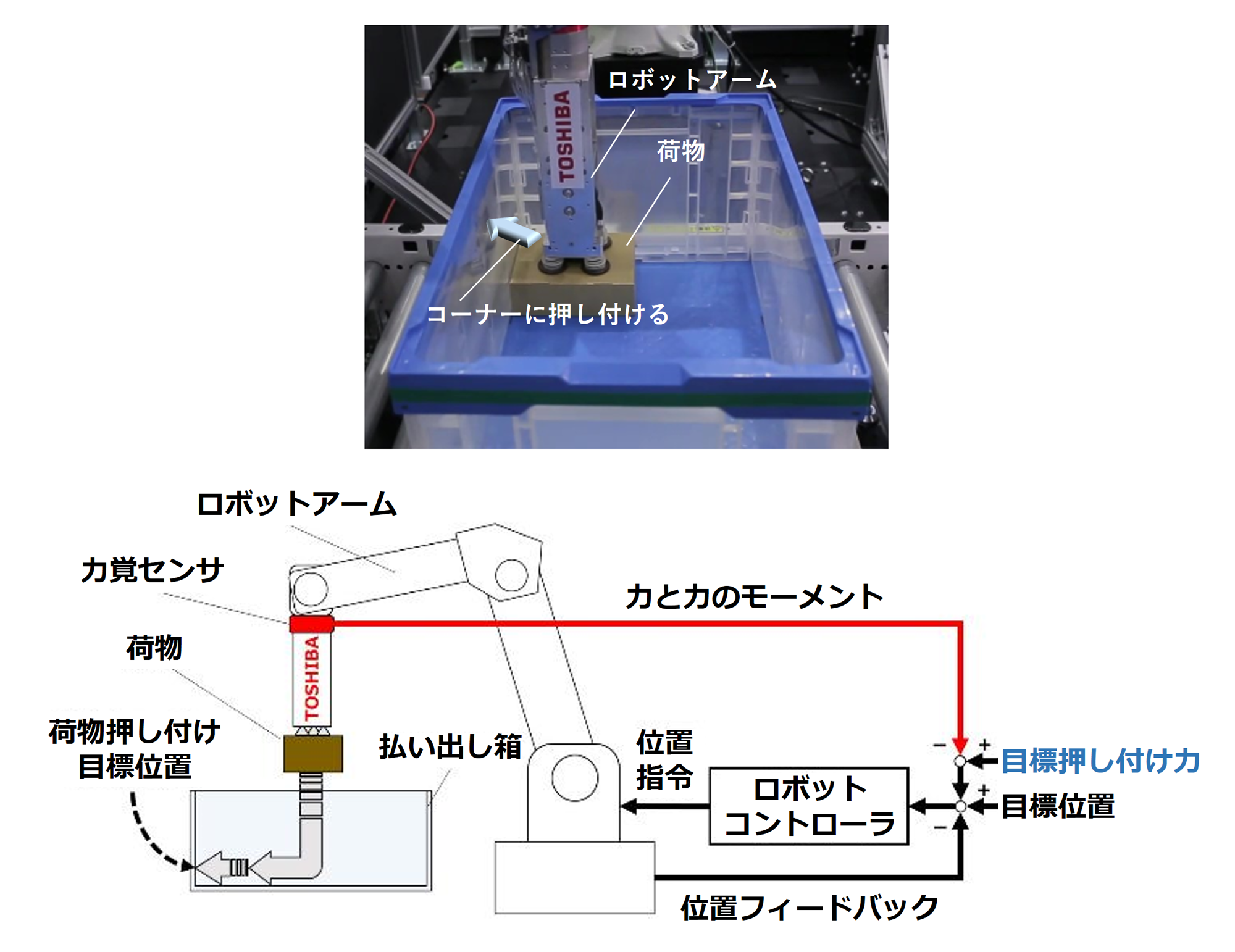
壁と荷物の接触を検出する「力覚センサ」搭載のロボットアームが、人間のように、荷物を端に寄せて配置することを実現する
また、荷物の形も、常に一定であるとは限らない。雑に積み上げられていたりすれば、斜めになっていることもあるだろう。また、荷物の大きさや形だけでなく、重さも様々だ。こうした違いにも人間の手は柔軟に対応する。斜めのモノを持つときの手つきや、重いモノを持ち上げるときの体勢など、人間に近い器用さを発揮するために、様々な形の荷物をつかむための複合把持機能を持つロボットアームを開発した。
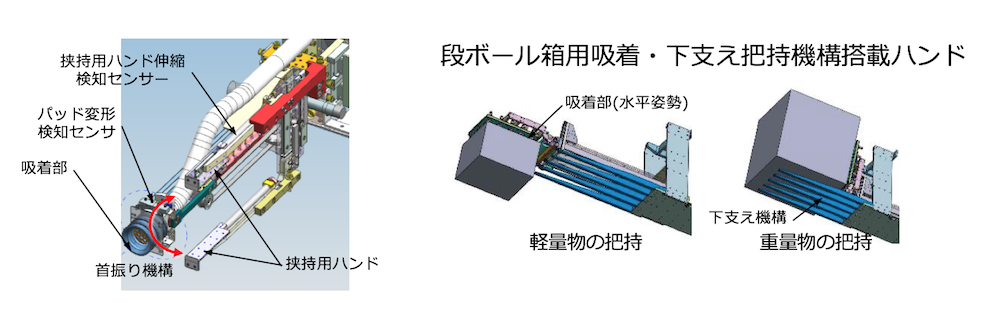
大きさや重さの異なる、様々な形のモノをつかむための、複合把持機構
安全にロボットを利用するために
ロボットが高知能化し、より器用な動作を獲得したのは、前述の通り「人間でなければ」と思われていた作業領域のロボットによる代替を実現するためだった。そして、この代替には大きな問題が潜んでいる。それが、安全性の確保である。
人間とロボットの距離が近くなることで、事故の危険性が高まる。安全を守るため、ロボットと人間の作業エリアを分けるなど、徹底した管理が必要となってくる
今までは、人間が隣り合って行っていた作業の一端をロボットが担うなど、ロボットの作業エリアがより人間に近づくことになる。人間同士なら、接触があったとしても危険は少ない。だが、ロボットとの接触は大きな事故につながる可能性を含むため、ロボットから人間を守るためのISO13849-1などに準拠した「安全設計技術」が重要となる。
安全設計技術には、基本となる原則がある。そのうちの一つが「隔離の原則」だ。これは、ロボットの作業エリアと人の作業エリアが干渉しないようにすることを求めた原則である。
しかし、人間の作業を代替するロボットを考える上で、人間の作業エリアとの干渉は避けられない問題となる。
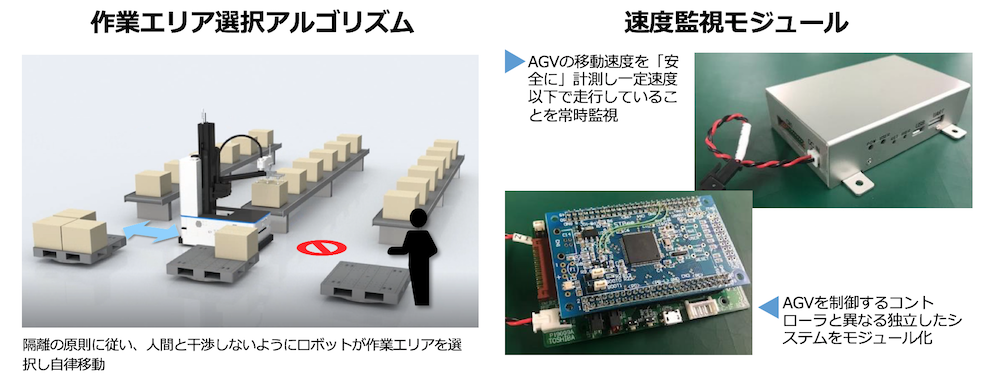
東芝では、作業エリア選択アルゴリズムを用いて、人間と干渉しないようにロボットが作業エリアを選択し自律移動するシステムを開発し、人間の安全を確保している。
また、東芝ではAGV(無人搬送車)に動作を制御するコントローラとは異なる、独立した速度監視モジュールを搭載し、常時客観的に一定速度以下で走行していることを監視し、安全を確保している。
ロボットのすべての技術は、常に人間の安全が確保された上に成り立つべきであると、東芝は考えている。人間を助けるために生み出されたロボットが人間を傷つけるような悲劇は、基本構想の段階から排除することが最重要課題なのである。
後編:応用編では、こうしたロボット技術を応用した、製造・流通・物流への東芝のロボットソリューションについて解説する。
![]()


この記事をシェアする