


東芝が提案する、令和時代のロボットソリューション 【後編】応用編
2019/12/18 Toshiba Clip編集部
この記事の要点は...
- 製造・流通・物流の自動化実現のための東芝ロボットソリューション
- 雑然と積み上げられた荷物も、正確に処理できる認識技術
- 荷物の大きさにかかわらず、人間同様の丁寧な取り扱いを実現
東芝は、長年にわたり製造・流通・物流業界へ自動化ソリューションを提案してきた。当初は、大量に高速で処理するという、ロボットにとって得意な分野を中心とする自動化だった。しかし、自動化ソリューションに今求められているのは、人間の代わりに作業するロボットだ。前編の[技術編]では、ロボットが人間の代わりに作業をするための「認識技術」「計画技術」「機構制御技術」と、それらを安全に利用するための「安全設計技術」について紹介した。
今回の後編[応用編]では、それらの技術を応用した次世代の製造・流通・物流業界向けロボットソリューションについて紹介する。
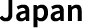
東芝が提案する、物流センター自動化ソリューション
(1)荷降ろしロボット
荷降ろしロボットは、東芝独自のXY軸機構で、30kgまでの荷物を降ろすことができる。また、一つずつ取り出すだけでなく、認識技術によって二個同時に取り出しが可能と判断した場合は、同時に取り出すことにより処理速度を上げることができる。
また、飲料水が納められた段ボールなど、比較的強度が不足している荷物の場合、持ち上げて箱を壊してしまうことを避けるため、箱を引きずるように移動させることで、壊れやすい箱と中身を守りながら運ぶことができる。
こうした、人間が普通に行っている作業ができるようになることで、大幅な効率化と、作業の幅を広げることに成功している。
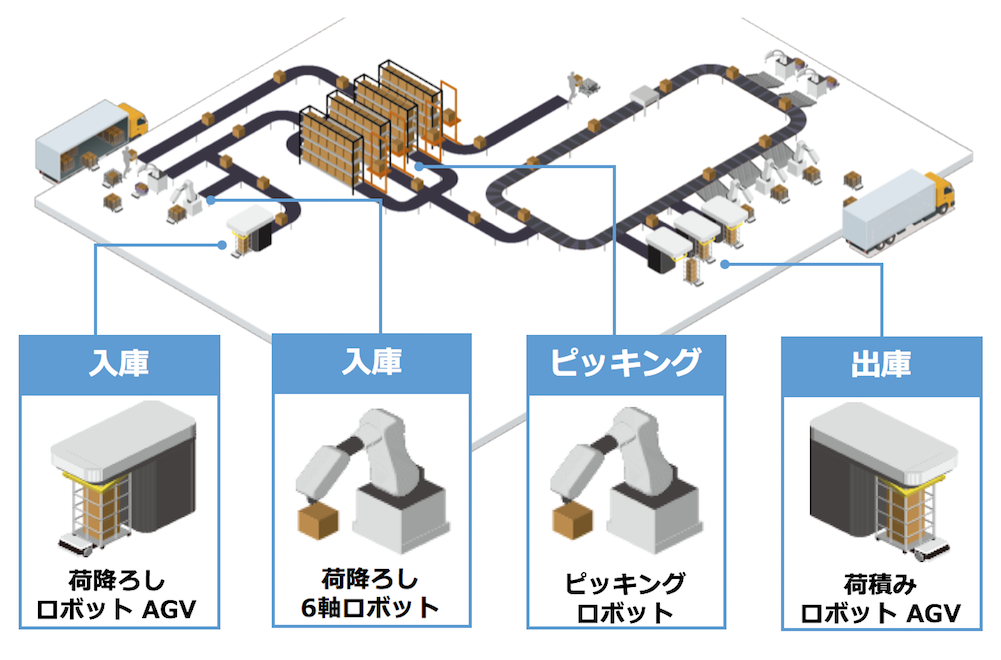
荷降ろしロボットによる、荷降ろし
この荷降ろしロボットは、上のビデオで紹介した荷物の引き込みパートと、それを受ける中間コンベアからなる。この中間コンベアが上下することで、荷物の高さの変化や最終的に荷物を引き渡す「既設コンベア」との高さの差を吸収する。
荷降ろしロボット
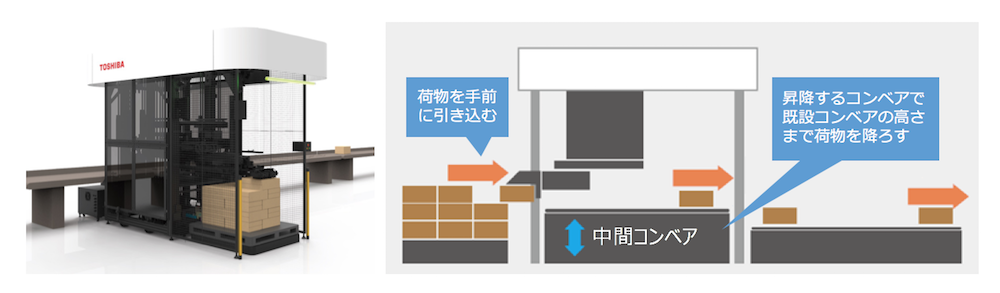
また、積み降ろす箱が密着しているなど、人間が見ても一つ一つの箱の境目がわかりづらいことがある。こうした場合にも、前編で紹介した「認識技術」によって箱の境目を正しく認識することで正確な箱の把持が可能となる。
独自の認識技術で多彩な積載パターンに対応
(2)荷降ろし6軸ロボット
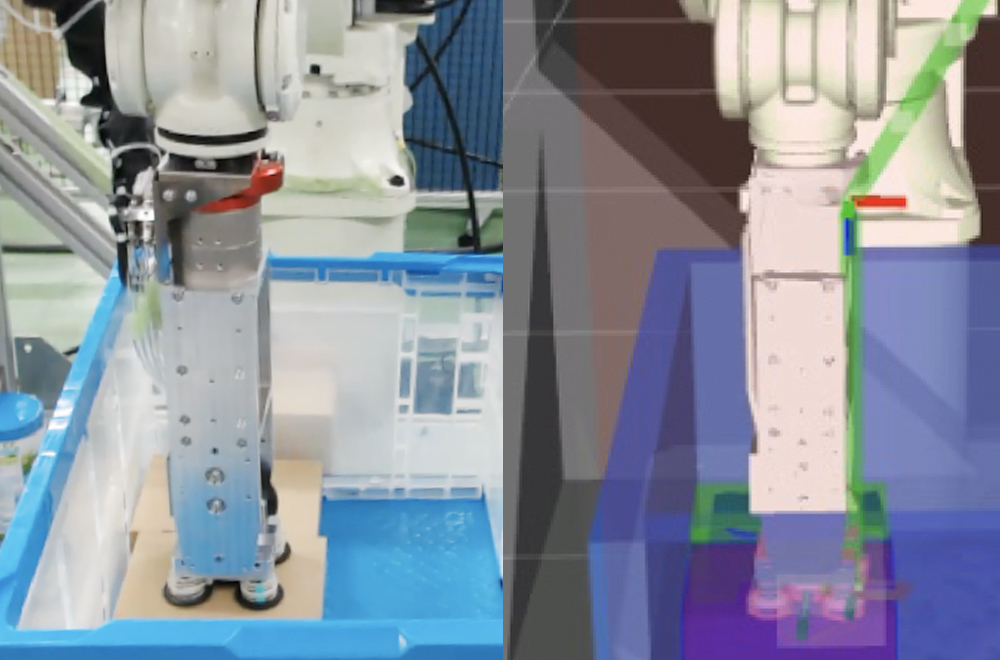
荷物は、いつもきれいに積み込まれているとは限らない。輸送中に崩れてしまうこともあるだろう。このような状況でも、フレキシブルな荷積み状態に対応できるのが、東芝の荷降ろし6軸ロボットだ。
雑然と積み上げられた荷物の位置や傾きは、RGBカメラと3Dカメラという2台のカメラの組み合わせで得られるデータを複合解析し判断する。このため、毎回異なる積まれ方をしていても、ロボット自身の判断で作業を進めることができるのだ。

さらに、こうした高知能化に、東芝が培ってきたメカトロニクスの技術を加えることで、さらなる効率化の提案も行われている。
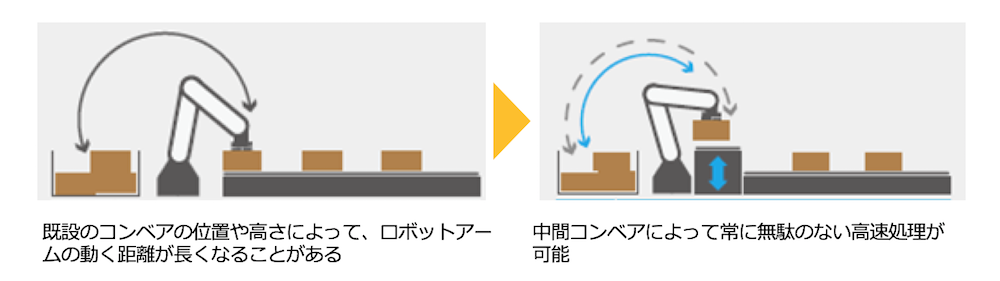
例えば、6軸ロボットアームがつかみ上げた荷物を、そのまま既設のコンベアに降ろすのではなく、その間に中間コンベアを設置することで、無駄な動きを省いた高速処理を実現できる場合がある。
このように、最新の技術と既存の技術を効率的に組み合わせることで、最小限のコストで最大の効率を実現することを目指している。
(3)ピースピッキングロボット
ピースピッキングロボットは、出荷のために荷物を一つの箱にまとめて入れるためのロボットだ。
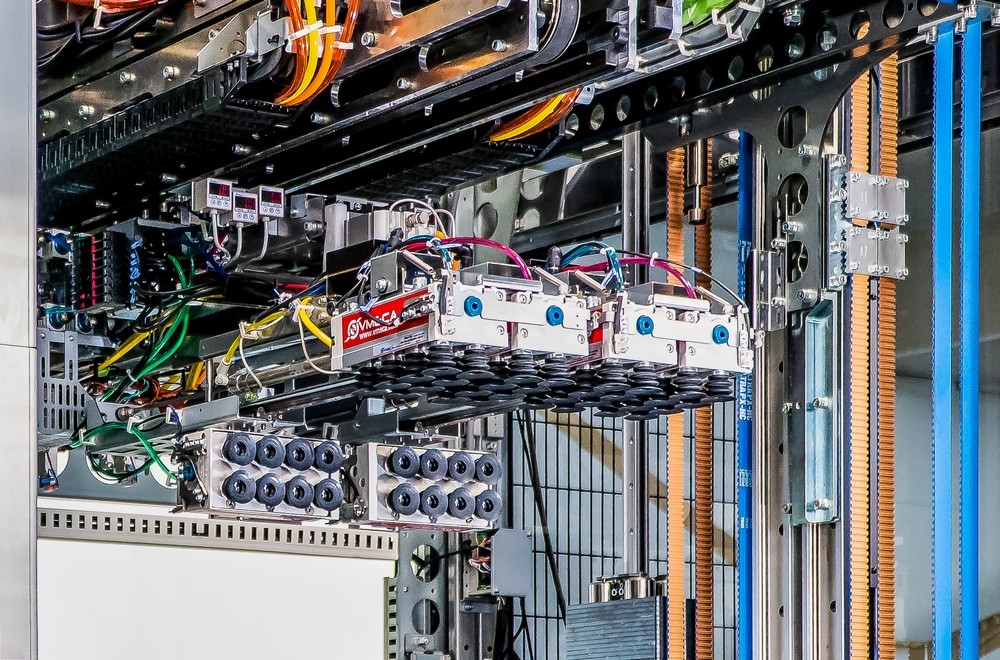
ここでも、様々な形の荷物を扱うための工夫が盛り込まれている。荷降ろし6軸ロボット同様に、傾いて配置された荷物にも吸着部の角度を合わせる「チルト機構」によって対応する。また、小さなモノをつかむ際には、把持部の吸盤を1つだけ使うなど、荷物の大きさに合わせて個別に対応することができる。
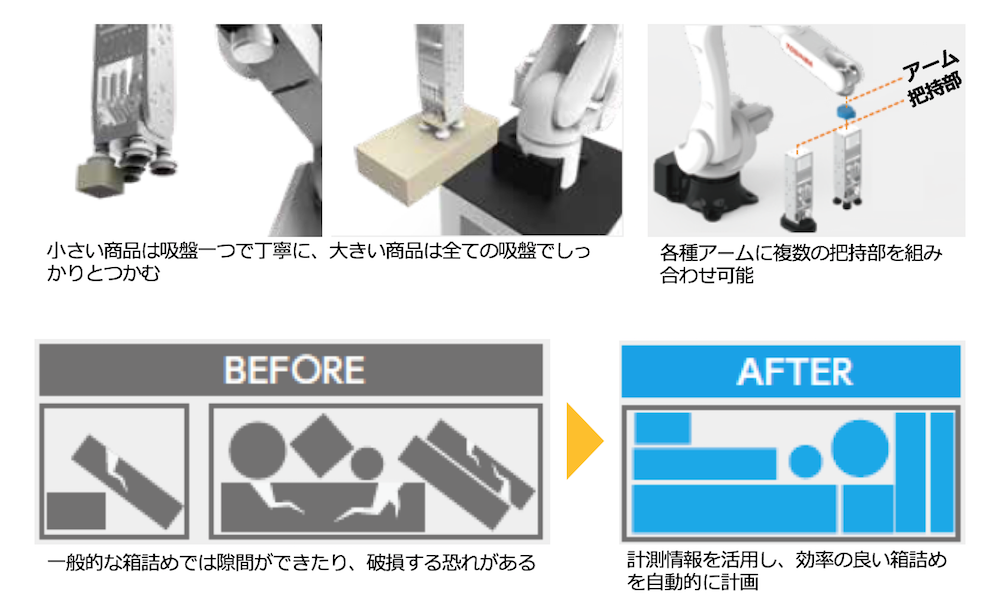
また、画像から得た情報を活用し、効率のいい配置を計画して箱詰めを行うことができる。さらに、箱の壁面に荷物を押し当てながら入れることで、人間が行うような、荷物を端に寄せて配置することも可能となっている。
様々な向きの荷物をしっかりとつかみ上げ、丁寧に荷物を端に寄せて配置する
(4)荷積みロボット
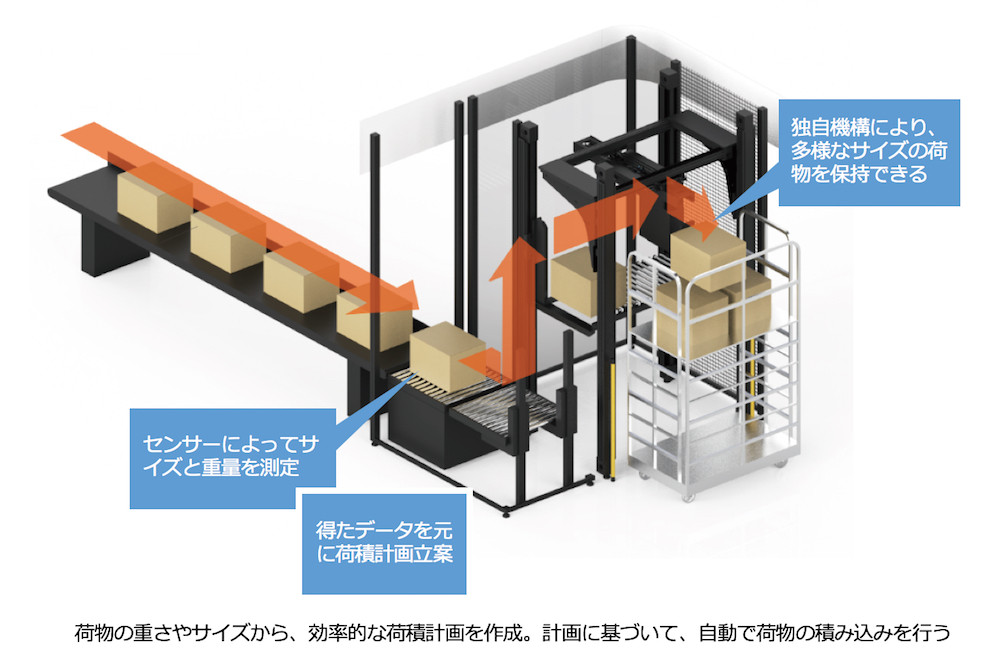
荷積みロボットは、パレット上に荷物を配置するロボットだ。パレットに配置された後、フォークリフトなどでトラックなどに積み込まれるため、ここでしっかりと荷物を並べることが求められる。
この荷積みロボットは、センサーによってサイズと重量を測定し、得られたデータを基に荷積計画を立案する独自の計画技術によって、違うサイズの箱を複数段に積み上げていくことができる。
この荷積みロボットについてはまだ開発中だが、前述の荷降ろしロボット、ピースピッキングロボットはすでに販売中である。
今後も、製造・流通・物流のさらなる自動化、データを活用したサプライチェーン全体の最適化を進めるため開発を続けている。今後の展開にぜひ期待していただきたい。
![]()


この記事をシェアする
