


原子炉格納容器の内部を探る 水中遊泳ロボットの奮闘!
2017/11/22 Toshiba Clip編集部
この記事の要点は...
- 水中遊泳ロボット、福島第一原子力発電所3号機に潜る!
- 調査実施までの厳しい訓練とエンジニアたちの苦闘
- 原子炉格納容器の内部でロボットが見たものは・・・?
3号機の格納容器内部調査に特化した水中遊泳ロボット
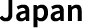
福島第一原子力発電所3号機の原子炉格納容器の内部を調査するために開発された水中遊泳ロボット。直径約13cm、長さ約30cm、重さ約2kgの小型ロボットで、水中を泳ぎまわるその姿から「ミニマンボウ型ロボット」と呼ばれている。東芝は技術研究組合 国際廃炉研究開発機構(IRID)の組合員として、国の補助金を活用してこの水中遊泳ロボットを開発。3号機の原子炉格納容器内部には約6mの高さまで水が溜まっているため、その水の中を遊泳し、格納容器の底部の調査用水中遊泳ロボットとして誕生したのである。
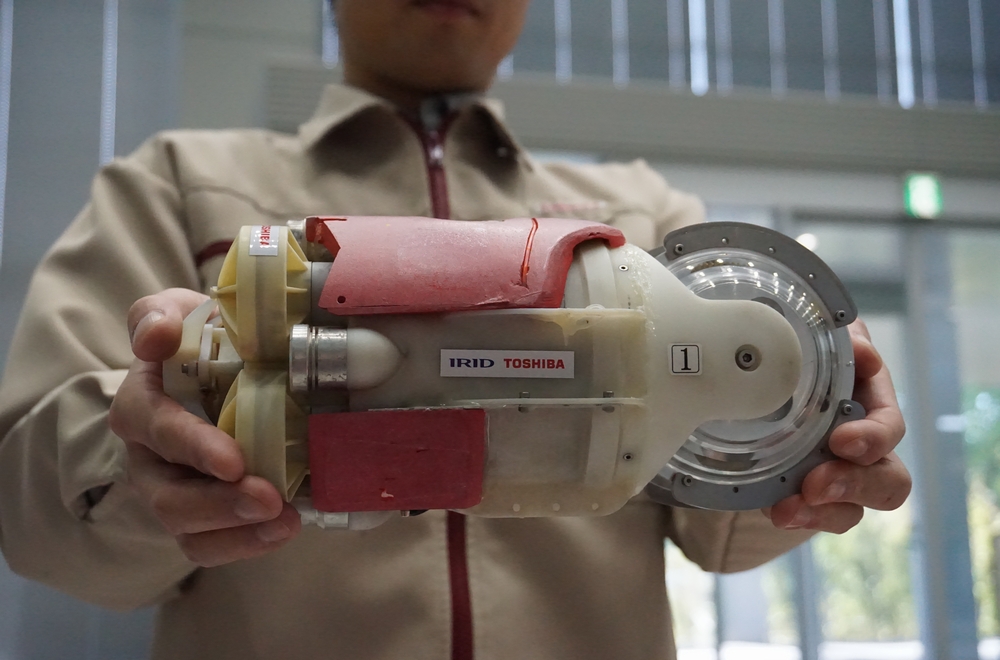
この水中遊泳ロボットは有線ケーブルによって約500m離れた免震棟から遠隔操作が可能。カメラとLEDライトが前方と後方に搭載されているため、暗闇の格納容器底部まで調査ができる。3号機は格納容器内部へアクセス可能な貫通口が直径約14cmと狭いため、放射線耐性を高めた上で、従来型のロボットを小型化・軽量化した。
この動画は2017年6月19日に公開されたものです。
2号機調査での教訓を生かした訓練プログラムを実施
3号機の調査を統括していた、東芝エネルギーシステムズ(株)原子力福島復旧・サイクル技術部の浅野真毅氏は、ロボットを使った福島第一原子力発電所2号機の内部調査を振り返り、「ものすごく悔しかった」と語る。2017年2月に実施した2号機の調査では、格納容器内の状況が分からない中でも調査できるよう、さまざまな想定をして訓練したが、調査の途中でロボットが動かなくなってしまったのだ。
一方、3号機は2号機と違い、格納容器内に水が溜まっているため、遊泳することで三次元空間を移動できるメリットがあった。ルートがふさがれるなどして地下階に行けなくなる可能性もあったが、ロボットの小型化と徹底した事前の操作訓練により、燃料デブリと見られる物体を映像で捉えることに成功した。
「3号機で燃料デブリらしきものが見えたとき、正直ホッとしました。一番心配していたのは、原子炉格納容器にある貫通口にロボットを入れるためのパイプを挿入し、そのパイプから水中遊泳ロボットを投入し着水させるところ。2ヶ月も訓練したので操作者の腕は信じていました」(浅野氏)

東芝エネルギーシステムズ(株)原子力福島復旧・サイクル技術部の浅野真毅氏(写真左)
東芝エネルギーシステムズ(株)プラントサービス・応用技術開発部の松崎謙司氏(写真右)
操作を指揮した東芝エネルギーシステムズ(株)プラントサービス・応用技術開発部の松崎謙司氏は、「2ヶ月の訓練期間は非常に過酷なスケジュールで大変でした。できるだけ現場と同じ状態を模擬したかったが、破損した構造物の状況が全く分からなかったので再現できませんでしたので、障害物を置いたり、ロボットがギリギリ通れる格子状の物を作った訓練を繰り返し行ったり、どのような状況においても大丈夫なように習熟度を上げてきました」と振り返った。
「モックアップを使った厳しい訓練のおかげで、今回の調査の目的は200%達成できたが、水中遊泳ロボットが途中で動かなくなることを心配して、昨年末からよく悪夢にうなされました」と明かした松崎氏。3号機の調査の成功は、技術者の懸命な訓練の賜物といえよう。
ロボットの小型化と推進力向上を同時に
水中遊泳ロボットの開発で最も大変だったのは、ロボットの小型化を実現すると同時に、ロボット自体の推進力を高めることだった。ロボットに繋がっているケーブルが格納容器内の壁などの構造物に接触しながら進んでいくため、小型で高出力なモータを搭載する必要があったが、それを実現するために制御回路が複雑になり、小さな水中遊泳ロボットに組み込むことが大変だったという。ケーブルは摩擦の小さいものを新たに開発したが、ケーブルがゆるんで構造物に引っ掛からないよう、まっすぐに前進・後退を繰り返すなど、ケーブルを擦らないための操作訓練を行った。
水中遊泳ロボットの技術は、実際に運転しているプラントの炉内構造物の定期検査にも使える。無線ではないため用途は限られるものの、三次元空間を自由に移動できるため、より一般的な使い道があるのではないかと考えられている。
燃料デブリの取り出しに向けて
今後の調査の方向性については、「今回の原子炉格納容器内部の調査で得られた結果をもとに、原子炉圧力容器内部調査や燃料デブリ取り出しなどの次のステップに行くのでは。福島第一原子力発電所にかかわったからには、今後も何かしら力になりたいと思っています。また、ロボットが大好きなエンジニアにとっては、まさにロボットしか活躍できない環境であり、開発したものをすぐに投入できるのでモチベーションは高い」と語る浅野氏と松崎氏。今回の調査を総括し、「3号機で無事に目的を果たせたことは、自信につながりました。習熟訓練をしっかりやり、想定リスクを考え、それに対処する。この地道な努力が報われました」と力を込めて話した。今後は取り出し装置の研究や設計に軸足を移し、福島第一原子力発電所の廃炉に取り組んでいく。

![]()





この記事をシェアする
